Skip to main content
Secondary menu
About Us
For investors
Careers
Contact
Search
Home
Engines
Coreless Motors
Brushless Dc Motors
Dc Micro Motors
PM Stepper Motors
Spur Gear Motors
Automobile Motors
Hybrid Stepper Motors
Micro Pumps
Planetary Gear Motors
Products
Solutions
For car
Automotive solutions
Cordless Impact Wrenches
Auto rear door linear actuator
For equipment
Precision & Office Equipment
Electric Meters
ATM & Currency Handling
For appliance
Home Appliances & Power Tools
Intelligent lock solution
Robotic Mowers
For consumer electronic
Intelligent robot solution
Sweeping robot driver program
Mobile phone telescopic camera
Specification
Blog
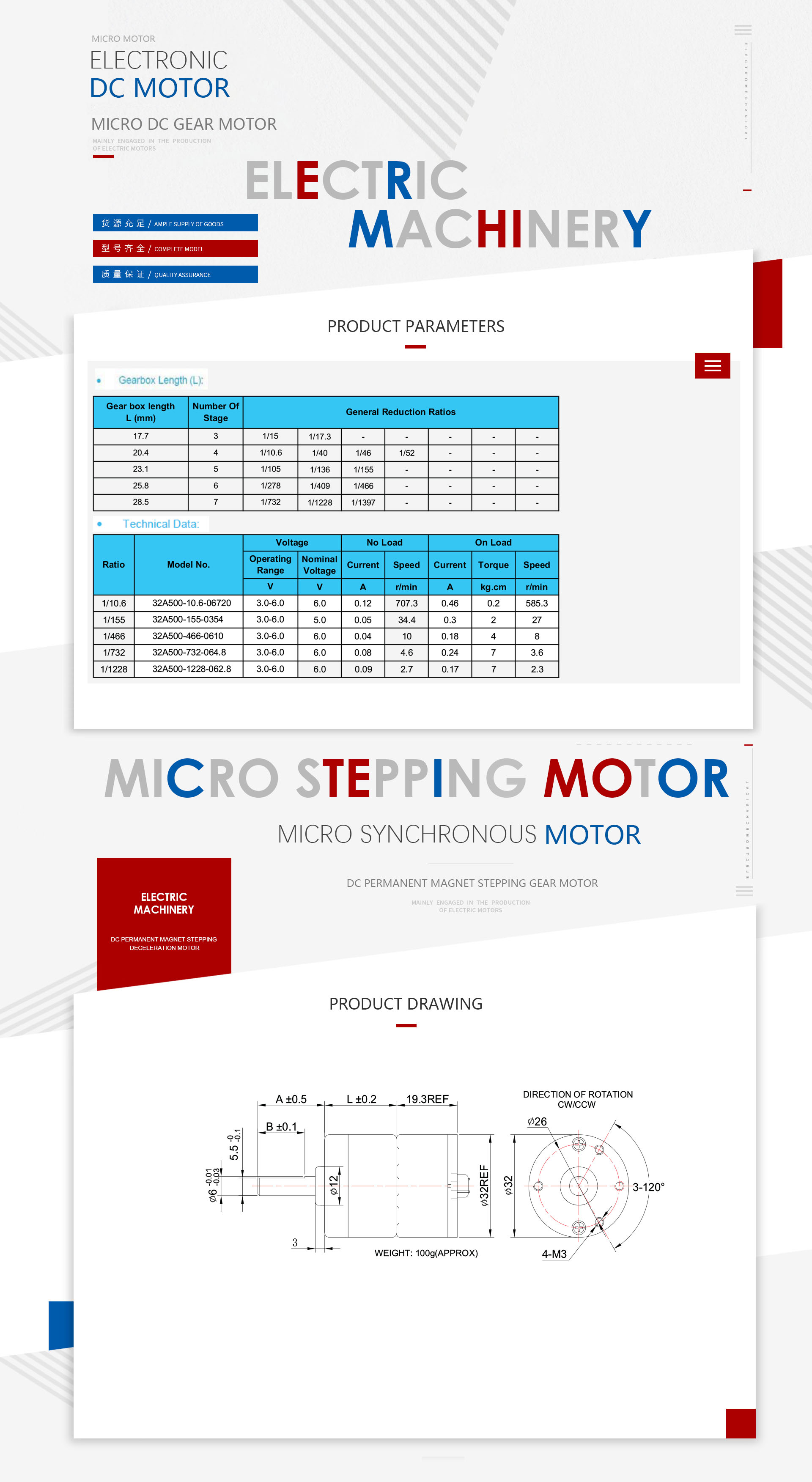
32A500
Ask for product
Description
Gear motor
Categories
Spur gear motors
Tags
Compact structure